LUONG QUOC VIET


Quoc Viet, Luong was born in Kon Tum City, Viet Nam. He received his Ph.D. degree from the School of Aerospace and Mechanical Engineering, Korea Aerospace University, South Korea. The main goal of his research is to improve the performance of intelligent landing gear equipped with an MR damper in different landing cases. Currently, he works as a Postdoctoral position in Incheon National University. He is looking forward to cooperating in artifical intelligent, robotics, and internet of things.
The simulation of single landing gear using RECURDYN-MATLAB
A landing gear of an aircraft is required to function at touchdown in different landing scenarios with parametric uncertainties. A typical passive damper in a landing gear has limited performance in differing landing scenarios, which can be overcome with magnetorheological (MR) dampers. An MR damper is a semi-active system that can adjust damping force by changing the amount of electric current applied to it. This paper proposes a new robust controller based on model reference sliding mode control and adaptive hybrid control to improve the efficiency of absorbing landing impact energy, not only considering the variables of aircraft weight and sink speed but also managing uncertainties, such as ambient temperature and passive damping coefficient. To verify the effectiveness of the proposed controller, comparative numerical simulations were performed with a passive damper, a skyhook controller, and the proposed controller under various landing scenarios. The simulation results show that the proposed controller improves the total energy absorber efficiency by up to 10% higher than that of the skyhook controller. In addition, the proposed controller is demonstrated to have better adaptability and robustness than the other control algorithms in the differing landing scenarios and parametric uncertainties.
For more information: LINK
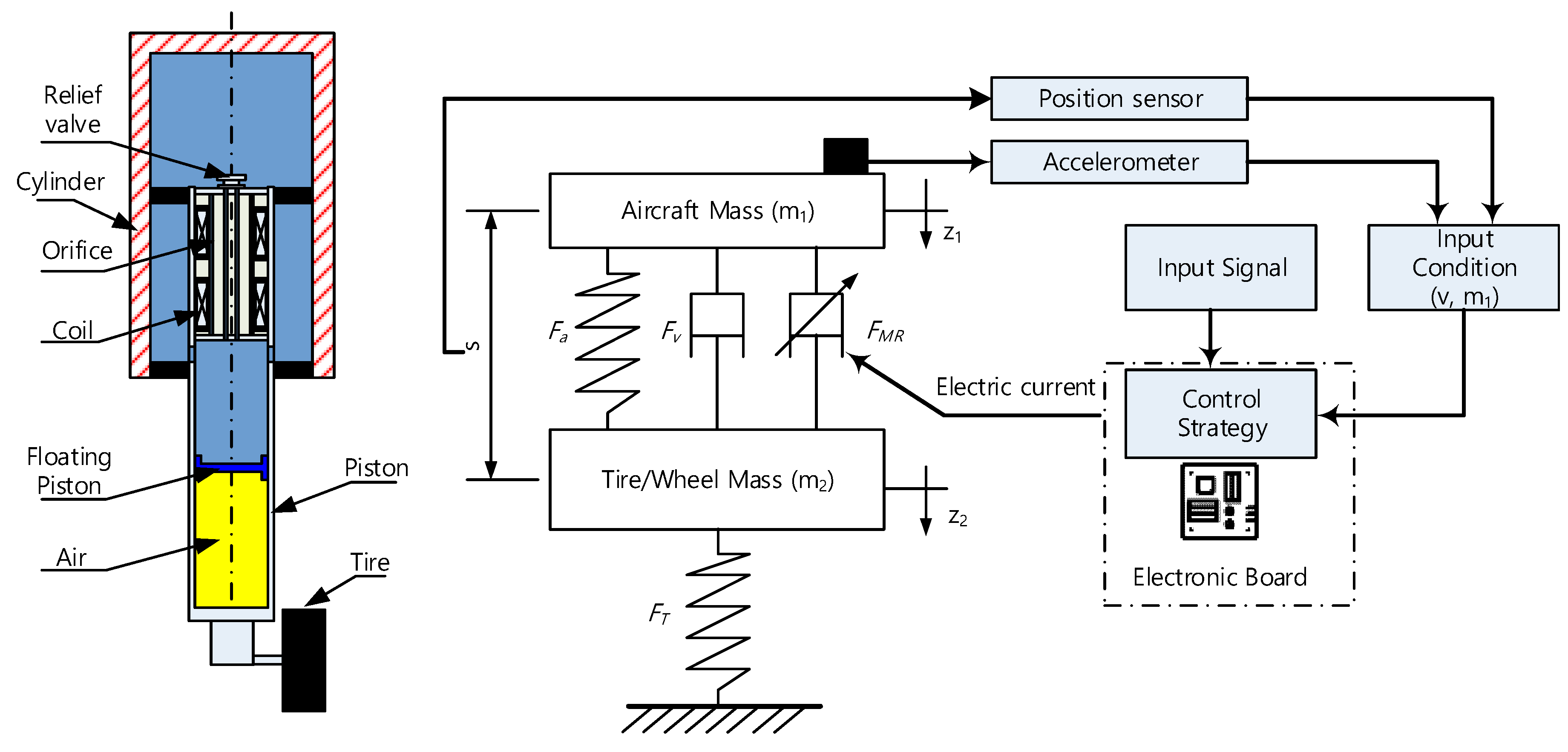
A typical oleo-pneumatic shock-absorbing strut (classic traditional passive damper) in aircraft landing gear has a metering pin extending through the orifice, which can vary the orifice area with the compression and extension of the damper strut. Because the metering pin is designed in a single landing condition, the traditional passive damper cannot adjust its damping force in multiple landing conditions. Magnetorheological (MR) dampers have been receiving significant attention as an alternative to traditional passive dampers. An MR damper, which is a typical semi-active suspension system, can control the damping force created by MR fluid under the magnetic field. Thus, it can be controlled by electric current. This paper adopts a neural network controller trained by two different methods, which are genetic algorithm and policy gradient estimation, for aircraft landing gear with an MR damper that considers different landing scenarios. The controller learns from a large number of trials, and accordingly, the main advantage is that it runs autonomously without requiring system knowledge. Moreover, comparative numerical simulations are executed with a passive damper and adaptive hybrid controller under various aircraft masses and sink speeds for verifying the effectiveness of the proposed controller. The main simulation results show that the proposed controller exhibits comparable performance to the adaptive hybrid controller without any needs for the online estimation of landing conditions.
For more information:LINK
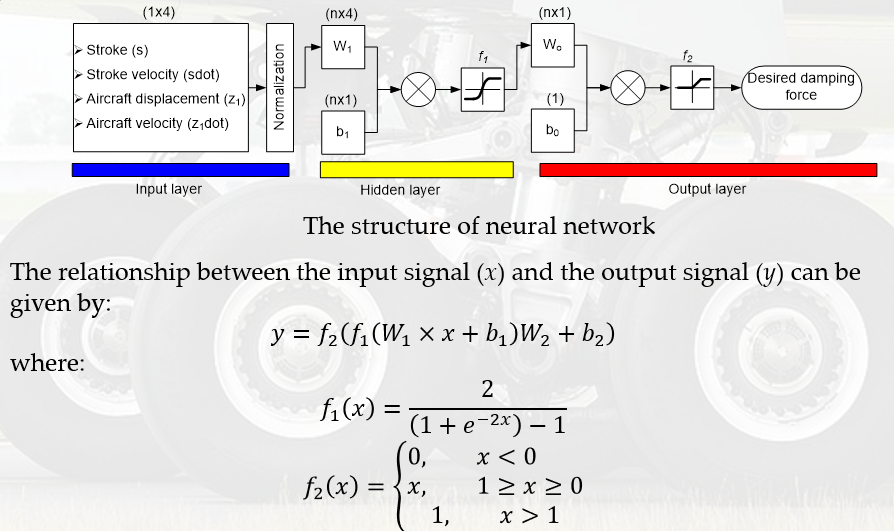
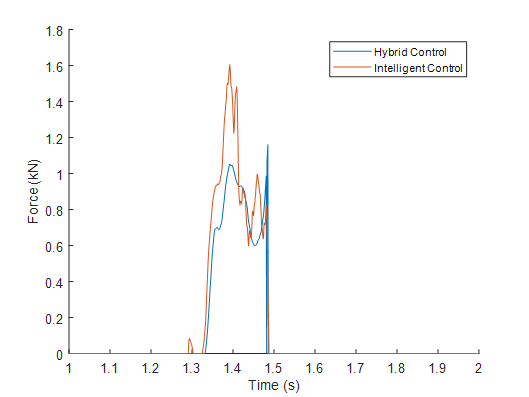
This paper adopts an intelligent controller based on supervised neural network control for a magnetorheological (MR) damper in an aircraft landing gear. An MR damper is a device capable of adjusting the damping force by changing the magnetic field generated in electric coils. Applying an MR damper to the landing gears of an aircraft could minimize the impact at landing and increase the impact absorption efficiency. Various techniques proposed for controlling the MR damper in aircraft landing gears require information on the damper force or the mass of the aircraft to determine optimal parameters and control commands. This information is obtained by estimation with a model in a practical operating environment, and the accompanying inaccuracies cause performance degradation. Machine learning-based controllers have also been proposed to address model dependency but require a large number of drop test data. Unlike simulations, which can conduct a large number of virtual drop tests, the cost and time are limited in the actual experimental environment. Therefore, a neural network controller with supervised learning is proposed in this paper to simulate the behavior of a proven controller only with system states. The experimental data generated by applying the hybrid controller with the exact mass and force information, which has demonstrated high performance among the existing techniques, are set as the target for supervised learning. To verify the effectiveness of the proposed controller, drop test experiments using the intelligent controller and the hybrid controller with and without exact information about aircraft mass and force are executed. The experimental results from the drop tests of a landing gear show that the proposed controller maintains superior performance to the hybrid controller without using explicit damper models or any information on the aircraft mass or strut force.
For more information: LINK
The landing gear drop test experiment:
Due to their extensive use in various applications, helicopters need to be able to land in a variety of conditions. Typically, a helicopter landing gear system with skids or passive wheel-dampers is designed based on only one critical touchdown condition. Thus, this helicopter landing gear system may not perform well in different landing conditions. A landing gear system with magnetorheological (MR) dampers would be a promising candidate to solve this problem. However, a semi-active controller must be designed to determine the electrical current applied to the MR damper to directly manage the damping force. This paper presents a new skyhook controller, called the skyhook extended controller, for a helicopter with multiple landing gears equipped with MR dampers to reduce the helicopters acceleration at the center of gravity in off-normal landing attitude conditions. A 9-DOF simulation model of a helicopter with multiple MR landing gears was built using RECURDYN. To verify the effectiveness of the proposed controller, co-simulations were executed with RECURDYN and MATLAB in different initial pitch and roll angles at touchdown. The main simulation results show that the proposed controller can greatly decrease the peak and rms acceleration of the helicopters center of gravity compared to a traditional skyhook controller and passive damper.
For more information: LINK
The simulation of the helicopter using RECURDYN-MATLAB
Introduction to Machine Learning by Duke University
Certification. For more information.WORKERA by Stanford University
Certification. For more information.
More information:LINK
This is Web devlopment project which links Machine Learning with Django
More information:LINK